
AVR Урок 18. Подключаем шаговый двигатель. Часть 1
Пожалуйста, подождите Сколько лет вы занимаетесь программированием PIC микроконтроллеров? Адаптация и сверхразрешение в антенных решетках. Программирование устройств на PIC микроконтроллерах » Схемотехника » Прочее » Контроллер биполярного шагового двигателя. Последние сообщения форума. Автор публикации: alex Просмотров: Добавлен: , Комментарии: 4.











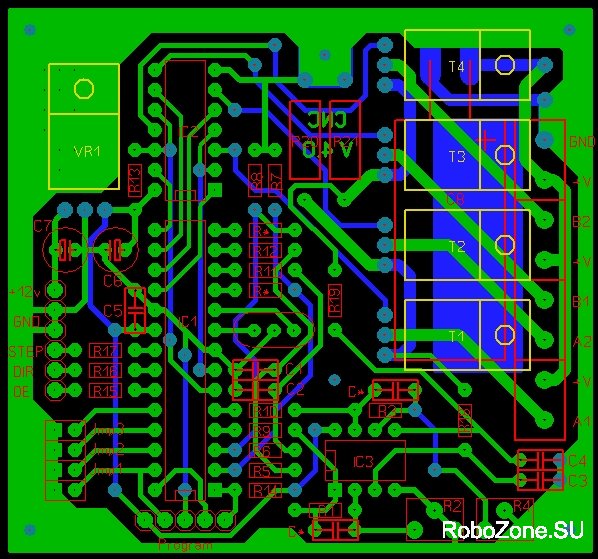

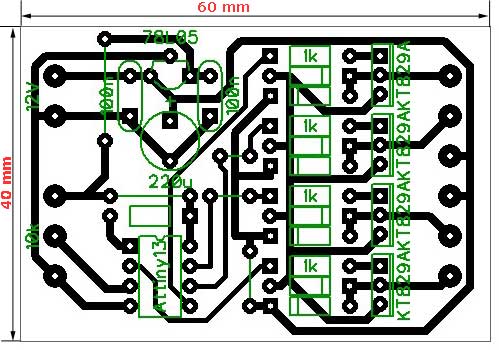
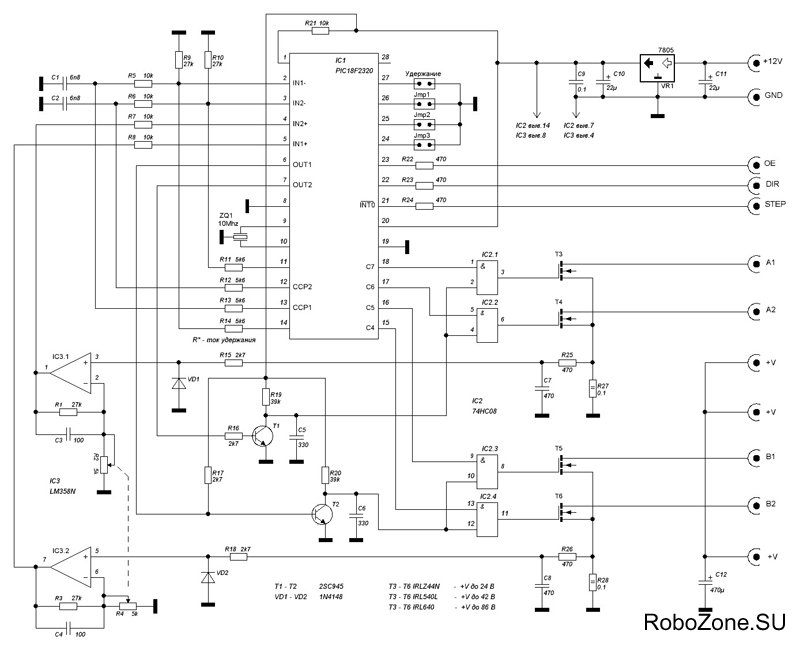
Поскольку драйвера для шаговиков LD более популярны у радиолюбителей, чем LB, и их гораздо легче достать, то, по просьбам форумчан, я решил написать продолжение статьи про управление биполярными шаговыми двигателями и рассмотреть схему с драйвером LD. Про то, как подключать обмотки и в каком порядке на них подавать сигналы, я писать не буду, это было подробно рассмотрено в первой части статьи , вместо этого давайте рассмотрим, чем, с точки зрения управления, драйвер LD отличается от рассмотренного нами ранее драйвера LB и как нужно переделать схему и программу управления, чтобы получить точно такое же устройство, только на драйвере LD. Итак, в чём же отличия? Во-первых, — в обозначениях.



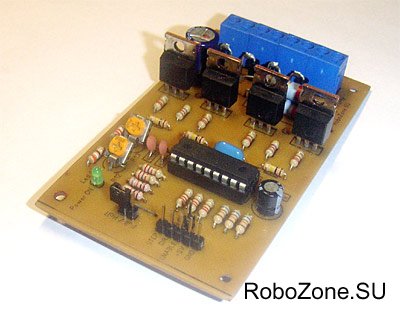





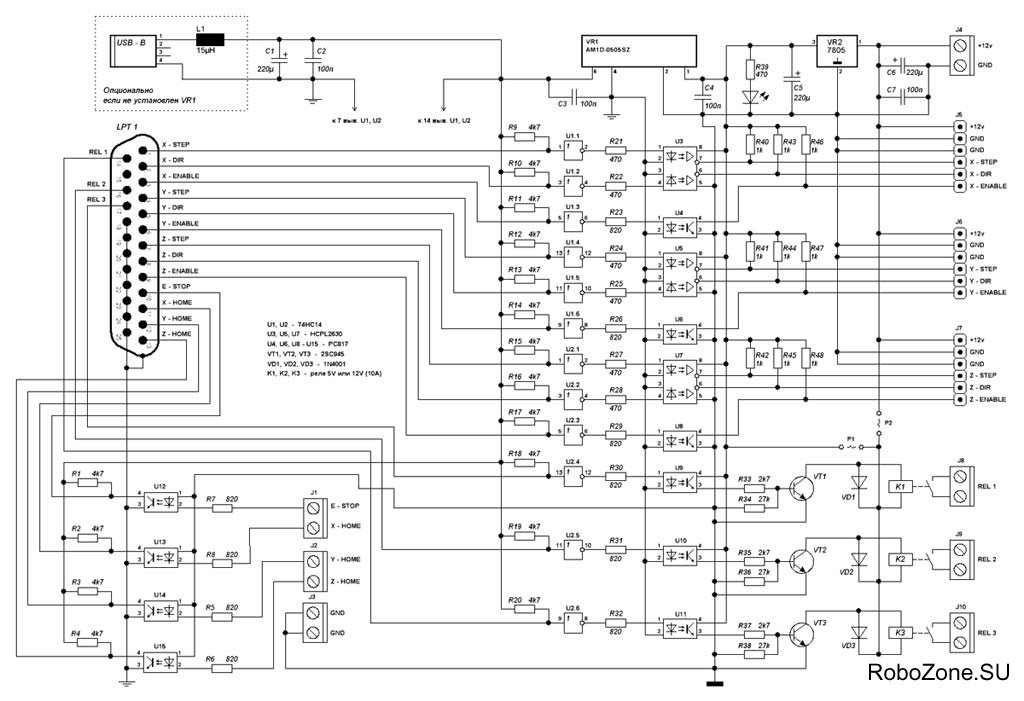


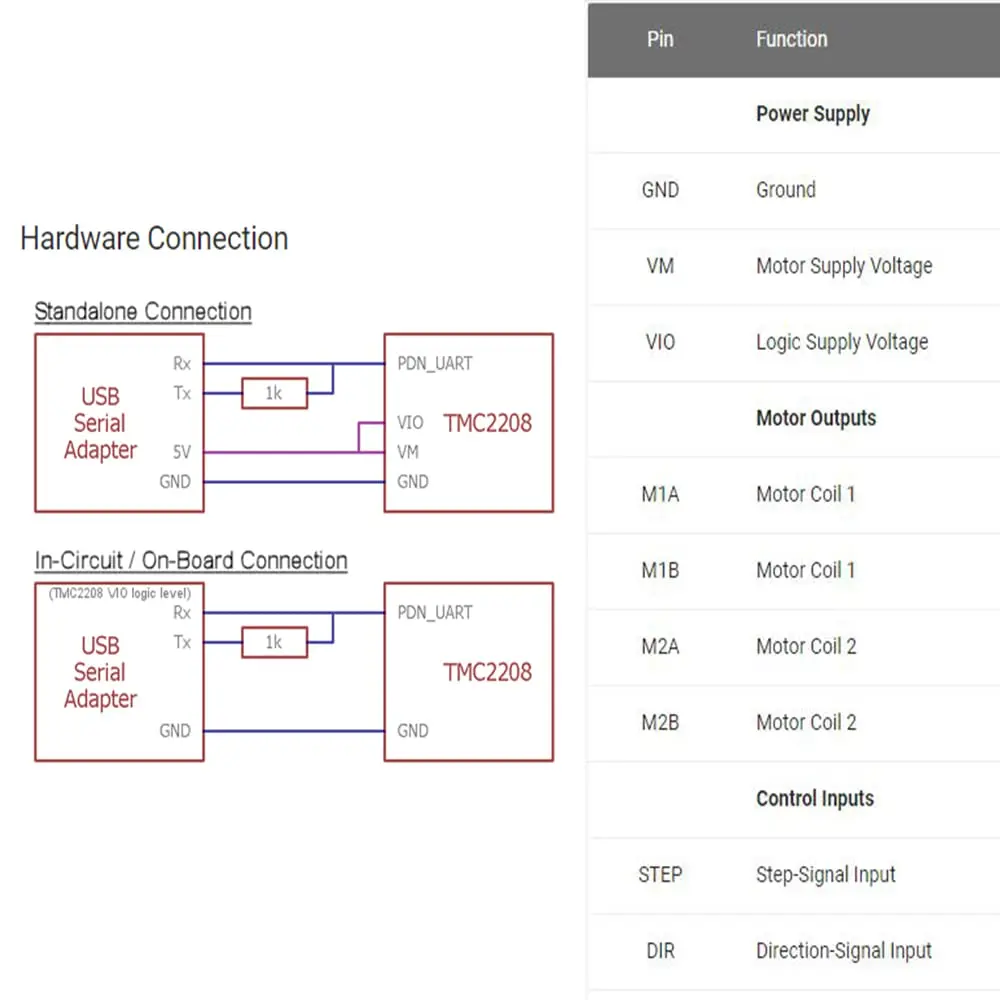
Продолжим подключение к микроконтроллеру Atmega8a подключить шагового двигателя. В прошлой части занятия мы изучили принцип работы шагового двигателя, а также драйвера шагового двигателя, а также изучили определёные режимы работы данного двигателя. В данной части занятия мы подключим его к живому контроллеру, а венее к нашей отладочной плате, и, хотя мы, скорее всего, им пока ещё не зашагаем, но код писать начнём. Для наглядности шагания я прицепил яркую скрепку к валу ротора двигателя, получилось вот так. Шаговый двигатель мы будем подключать вот к такому драйверу.



Похожие статьи
- Схема подключения шагового - Устройство и схема подключения датчика движения
- Прически на выпускной своими руками пошаговые фото - Как сделать прическу на выпускной своими руками
- Клапан воздушный своими руками - Обратный клапан своими руками: пошаговая инструкция
- Чем можно фаршировать яйца рецепт пошагово